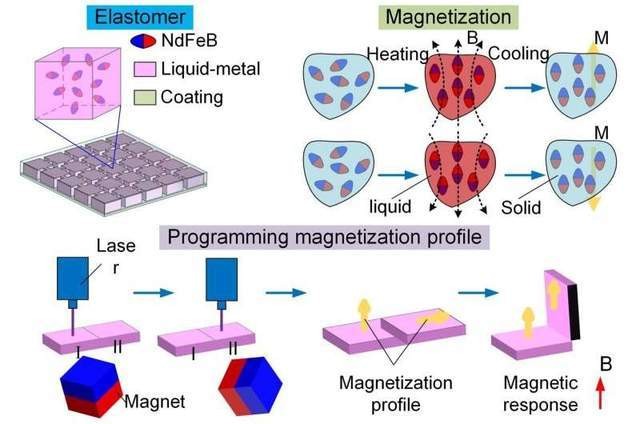
磁性软体机器人是一种在磁场作用下可以改变形状或执行不同动作的系统,具有无线驱动、高灵活性和无限持久性...
近日,天津大学材料学院教授封伟研发了一种具备自主行动能力和触觉应变的4D打印软体机器人
近期,国外一家科研团队研制出一款可用于挖洞的软体机器人,吸引了人们的目光。